区间调度算法
区间调度问题是一个很经典的贪心算法问题。 贪⼼算法可以认为是动态规划算法的⼀个特例, 相⽐动态规划, 使⽤贪⼼算法需要满⾜更多的条件(贪⼼选择性质),但是效率⽐动态规划要⾼ 。
leetcode435. 无重叠区间
给定一个区间的集合,找到需要移除区间的最小数量,使剩余区间互不重叠。
注意:
可以认为区间的终点总是大于它的起点。
区间 [1,2] 和 [2,3] 的边界相互“接触”,但没有相互重叠。
示例 1:输入: [ [1,2], [2,3], [3,4], [1,3] ]
输出: 1
解释: 移除 [1,3] 后,剩下的区间没有重叠。
示例 2:输入: [ [1,2], [1,2], [1,2] ]
输出: 2
解释: 你需要移除两个 [1,2] 来使剩下的区间没有重叠。
示例 3:输入: [ [1,2], [2,3] ]
输出: 0
解释: 你不需要移除任何区间,因为它们已经是无重叠的了
这个问题有许多看起来不错的贪⼼思路, 却都不能得到正确答案。 ⽐如说:也许我们可以每次选择可选区间中开始最早的那个? 但是可能存在某些区间开始很早, 但是很⻓, 使得我们错误地错过了⼀些短的区间。 或者我们每次选择可选区间中最短的那个? 或者选择出现冲突最少的那个区间? 这些⽅案都能很容易举出反例, 不是正确的⽅案。
正确的思路其实很简单, 可以分为以下三步:
- 从区间集合 intvs 中选择⼀个区间 x, 这个 x 是在当前所有区间中结束早的(end 最⼩)
- 把所有与 x 区间相交的区间从区间集合 intvs 中删除。
- 重复步骤 1 和 2, 直到 intvs 为空为⽌。 之前选出的那些 x 就是最⼤不
相交⼦集。
1 | class Solution { |
leetcode452. 用最少数量的箭引爆气球
在二维空间中有许多球形的气球。对于每个气球,提供的输入是水平方向上,气球直径的开始和结束坐标。由于它是水平的,所以y坐标并不重要,因此只要知道开始和结束的x坐标就足够了。开始坐标总是小于结束坐标。平面内最多存在10^4个气球。
一支弓箭可以沿着x轴从不同点完全垂直地射出。在坐标x处射出一支箭,若有一个气球的直径的开始和结束坐标为 xstart,xend, 且满足 xstart ≤ x ≤ xend,则该气球会被引爆。可以射出的弓箭的数量没有限制。 弓箭一旦被射出之后,可以无限地前进。我们想找到使得所有气球全部被引爆,所需的弓箭的最小数量。
Example:
1 | 输入: |
这个问题和区间调度算法⼀模⼀样! 如果最多有 n 个不重叠的区间, 那么就⾄少需要 n 个箭头穿透所有区间。只是有⼀点不⼀样, 在 intervalSchedule 算法中, 如果两个区间的边界触碰, 不算重叠; ⽽按照这道题⽬的描述, 箭头如果碰到⽓球的边界⽓球也会爆炸, 所以说相当于区间的边界触碰也算重叠。
在上道题目的基础上稍微修改即可:
1 | class Solution { |
区间调度问题之区间合并
leetcode56. 合并区间
给出一个区间的集合,请合并所有重叠的区间。
示例 1:
1 | 输入: intervals = [[1,3],[2,6],[8,10],[15,18]] |
示例 2:
1 | 输入: intervals = [[1,4],[4,5]] |
⼀个区间可以表⽰为 [start, end] , 前⽂聊的区间调度问题, 需要按 end排序, 以便满⾜贪⼼选择性质。 ⽽对于区间合并问题, 其实按 end 和start 排序都可以, 不过为了清晰起⻅, 我们选择按 start 排序。
显然, 对于⼏个相交区间合并后的结果区间 x , x.start ⼀定是这些相交区间中 start 最⼩的, x.end ⼀定是这些相交区间中 end 最⼤的。
1 | class Solution { |
区间交集问题
leetcode986. 区间列表的交集
给定两个由一些 闭区间 组成的列表,每个区间列表都是成对不相交的,并且已经排序。
返回这两个区间列表的交集。
(形式上,闭区间 [a, b](其中 a <= b)表示实数 x 的集合,而 a <= x <= b。两个闭区间的交集是一组实数,要么为空集,要么为闭区间。例如,[1, 3] 和 [2, 4] 的交集为 [2, 3]。)
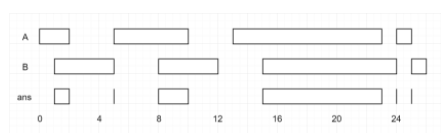
输入:A = [[0,2],[5,10],[13,23],[24,25]], B = [[1,5],[8,12],[15,24],[25,26]]
输出:[[1,2],[5,5],[8,10],[15,23],[24,24],[25,25]]
画图可知规律。
1 | class Solution { |

